

GB/T 10395.27-2020 农林机械 安全 第27部分:缠膜机
- 发表时间:2023-01-30
- 来源:共立消防
- 人气:
1 范围
本部分规定了设计和制造悬挂式、半悬挂式、牵引式和固定式缠膜机(包括打捆缠膜一体机)的安全要求和验证方法。
本部分给出了消除或降低机器使用过程中发生危险的方法及在正常使用和维护过程中可合理预见因操作者误用发生危险的方法。此外,还规定了制造商应提供的安全操作信息的类型。
注1:上述缠膜机的示例在附录A中列出。
注2:捡拾打捆机的规定由GB 10395.20给出。
根据本部分规定设计和制造的机器,当本部分规定与GB10395.1-2009中所陈述规定不同时,本部分规定优先于GB 10395.1-2009的规定。
本部分涉及了在预定使用和制造商可合理预见误用情况下使用悬挂式、半悬挂式、牵引式和固定式缠膜机(包括打捆缠膜一体机)相关的所有重大危险、危险状态和危险事件(参见第4章)。
本部分不适用于下列机器:
——不可移动固定式缠膜机;
——管状/轴向串联缠膜机;
——成型室内仅沿草捆圆周方向进行捆包的机器;
——影响性能的控制系统安全部件;
——环境危险(噪声除外)、道路安全及与动力传动运动部件相关的危险;
——与专业服务人员进行维修或保养相关的危险。
注3:本部分不包含与道路交通法规有关的具体规定。
2 规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 2893.1 图形符号 安全色和安全标志 第1部分:安全标志和安全标记的设计原则(GB/T 2893.1-2013,ISO 3864-1:2011,MOD)
GB/T 5226.1 机械电气安全 机械电气设备 第1部分:通用技术条件(GB/T 5226.1-2019,IEC 60204-1:2016,IDT)
GB/T 9480 农林拖拉机和机械、草坪和园艺动力机械 使用说明书编写规则(GB/T 9480-2001,eqv ISO 3600:1996)
GB 10395.1-2009 农林机械 安全 第1部分:总则(ISO 4254-1:2008,MOD)
GB/T 13306 标牌
GB/T 15706-2012 机械安全 设计通则 风险评估与风险减小(ISO 12100:2010,IDT)
GB/T 16855.1 机械安全 控制系统安全相关部件 第1部分:设计通则(GB/T 16855.1-2018,ISO 13849-1:2015,IDT)
GB/T 16855.2 机械安全 控制系统安全相关部件 第2部分:确认(GB/T 16855.2-2015,ISO 13849-2:2012,IDT)
GB/T 21398 农林机械 电磁兼容性 试验方法和验收规则(GB/T 21398-2008,ISO 14982:1998,IDT)
GB/T 23821-2009 机械安全 防止上下肢触及危险区的安全距离(ISO 13857:2008,IDT)
GB/T 25078.1 声学 低噪声机器和设备设计实施建议 第1部分:规划(GB/T 25078.1-2010,ISO/TR 11688-1:1995,IDT)
GB/T 25078.2 声学 低噪声机器和设备设计实施建议 第2部分:低噪声设计的物理基础(GB/T 25078.2-2010,ISO/TR 11688-2:1998,IDT)
3 术语和定义
GB 10395.1-2009和GB/T 15706界定的以及下列术语和定义适用于本文件。
3.1
缠膜机 bale wrapper
将捆包用塑料薄膜进行缠绕包裹的机具。
3.2
固定式缠膜机 stationary bale wrapper
在固定位置、也可从一个地方转移到另一个地方,将通过其他方式装载过来的单个或多个捆包进行固定缠膜作业,且自带动力源的缠膜机。
注1:本部分不包括管状轴向串联缠膜机。
注2:示例见图A.4。
3.3
不可移动固定式缠膜机 non-mobile fixed bale wrappers
不能从一个地方移到另一个地方的固定式缠膜机。
3.4
固定平台 fixed platform
机器部件,用于放置被缠膜捆包并将旋转运动传递给捆包,使捆包随卷轴或皮带绕与地面平行的轴线旋转的平台。
注:示例见图1。
3.5
旋转平台 rotating platform
使捆包绕着与地面平行的轴线旋转的同时,将另一个旋转运动传递给捆包使其绕着与地面垂直的轴线旋转的平台。
注:示例见图2。
3.6
自动装载平台 self-loading platform
能直接从地面捡拾捆包并将捆包卸载到地面的装置。
3.7
拉伸系统 stretching system
由包括薄膜辊子在内的多个辊子组成,根据不同圆周速度拉伸薄膜的系统。
3.8
缠膜臂 wrapping arm
包含拉伸系统,使拉伸系统围绕捆包旋转从而给捆包缠膜的装置。
3.9
装载臂/系统 loading arm/system
将捆包从地面捡起并装载到工作平台的系统。
3.10
卸载系统 unloading system
将缠完膜的捆包卸载到地面的装置。
3.11
自动模式 automatic mode
机器正常操作模式之一,操作人员或机器本身启动该模式后,在没有操作人员干预的情况下,可实现重复或停止工作循环。
3.12
工作循环 work cycle
连续重复发生的,既可以回到起始点,也可以到达预定停止点的一系列工序。
3.13
无线遥控装置 wireless or cable-less remote control
具有启停自动循环、也可具有控制装载或卸载功能开关的无线装置。
3.14
有线遥控装置 wired or cabled remnote control
通过电缆实现信号传输,集成带有能够实现机器各项功能的手动开关和电气控制元件的遥控装置。
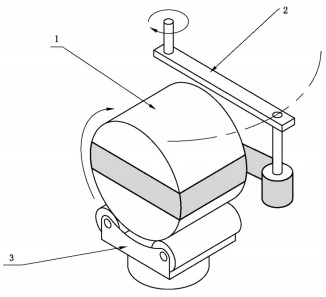
说明:
1——捆包:
2——缠膜臂;
3——固定平台。
图1 固定平台及捆包和缠膜臂的旋转
以上为标准部分内容,如需看标准全文,请到相关授权网站购买标准正版。
-
 IG541混合气体灭火系统
IG541混合气体灭火系统:IG-541灭火系统采用的IG-541混合气体灭火剂是由大气层中的氮气(N2)、氩气(Ar)和二氧化碳(CO2)三种气体分别以52%、40%、8%的比例混合而成的一种灭火剂
IG541混合气体灭火系统
IG541混合气体灭火系统:IG-541灭火系统采用的IG-541混合气体灭火剂是由大气层中的氮气(N2)、氩气(Ar)和二氧化碳(CO2)三种气体分别以52%、40%、8%的比例混合而成的一种灭火剂 -
 二氧化碳气体灭火系统
二氧化碳气体灭火系统:二氧化碳气体灭火系统由瓶架、灭火剂瓶组、泄漏检测装置、容器阀、金属软管、单向阀(灭火剂管)、集流管、安全泄漏装置、选择阀、信号反馈装置、灭火剂输送管、喷嘴、驱动气体瓶组、电磁驱动
二氧化碳气体灭火系统
二氧化碳气体灭火系统:二氧化碳气体灭火系统由瓶架、灭火剂瓶组、泄漏检测装置、容器阀、金属软管、单向阀(灭火剂管)、集流管、安全泄漏装置、选择阀、信号反馈装置、灭火剂输送管、喷嘴、驱动气体瓶组、电磁驱动 -
 七氟丙烷灭火系统
七氟丙烷(HFC—227ea)灭火系统是一种高效能的灭火设备,其灭火剂HFC—ea是一种无色、无味、低毒性、绝缘性好、无二次污染的气体,对大气臭氧层的耗损潜能值(ODP)为零,是卤代烷1211、130
七氟丙烷灭火系统
七氟丙烷(HFC—227ea)灭火系统是一种高效能的灭火设备,其灭火剂HFC—ea是一种无色、无味、低毒性、绝缘性好、无二次污染的气体,对大气臭氧层的耗损潜能值(ODP)为零,是卤代烷1211、130 -
 手提式干粉灭火器
手提式干粉灭火器适灭火时,可手提或肩扛灭火器快速奔赴火场,在距燃烧处5米左右,放下灭火器。如在室外,应选择在上风方向喷射。使用的干粉灭火器若是外挂式储压式的,操作者应一手紧握喷枪、另一手提起储气瓶上的
手提式干粉灭火器
手提式干粉灭火器适灭火时,可手提或肩扛灭火器快速奔赴火场,在距燃烧处5米左右,放下灭火器。如在室外,应选择在上风方向喷射。使用的干粉灭火器若是外挂式储压式的,操作者应一手紧握喷枪、另一手提起储气瓶上的
